


Abstract
The self-attraction effect needs to be evaluated and corrected towards a 10−9 level absolute determination of the local gravitational acceleration g in Kibble balance experiments. In this paper, the self-attraction effect of the BIPM Kibble balance apparatus is modelled by linking the gravitational field to the electrical field based on an electrostatic finite element analysis. A mapping of the gravitational field with different construction segments of the apparatus is presented, yielding a total correction of  Gal at the mean trajectory position. Experimental measurements are carried out to check the self-attraction model. Based on the obtained result and previous measurements, we updated the g determination along the measurement trajectory for the forthcoming Planck constant measurement.
Gal at the mean trajectory position. Experimental measurements are carried out to check the self-attraction model. Based on the obtained result and previous measurements, we updated the g determination along the measurement trajectory for the forthcoming Planck constant measurement.
Export citation and abstract BibTeX RIS
1. Introduction
There is expected to be an important revision of the international system of units (SI) in 2018 whereby all seven SI base units will be defined by fixing fundamental physical constants [1]. In the field of mass metrology, the kilogram will no longer be defined by an artefact, i.e. the international prototype of the kilogram (IPK). Instead, the kilogram will be redefined based on fixing the numerical value of the Planck constant, h, in the revised SI [2]. In order to ensure a seamless continuity in mass metrology, according to a requirement from the Consultative Committee for Mass and Related Quantities (CCM), the new kilogram definition can be adopted only when the Planck constant is precisely determined with the relative uncertainty of a few parts in 108 [3]. To achieve this goal, several national metrology institutes (NMIs) and the BIPM are currently working on accurate measurement of the Planck constant [4–13].
The Kibble balance [14] compares the electrical power to the mechanical power, and can link the mass to the Planck constant h by using two quantum effects: the Josephson effect [15] and quantum Hall effect [16]. A detailed Kibble balance working principle can be found in recent review papers, e.g. [17, 18]. In order to achieve a combined 10−8 level uncertainty for Kibble balances, the absolute value of the gravitational acceleration g should be determined with an even lower uncertainty, e.g. a few parts in 109. Accordingly, several important corrections for g measurement, e.g. Earth tides, polar motion, atmospheric mass redistribution, as well as self attraction, should be considered. A standard procedure for g determination in Kibble balances is (1) measure the absolute gravitational acceleration ga0 at a reference point, (2) map the micro-gravity at multiple points of the background (without the Kibble balance apparatus), (3) calculate the absolute ga value at the weighing position based on fitting the measurement, and (4) evaluate contribution terms from the self-attraction effect  and other corrections
and other corrections  . The local gravitational acceleration is then determined as
. The local gravitational acceleration is then determined as

Accurate determinations of ga and  have been reported in [19] with a total uncertainty of 4.2 μGal for the BIPM Kibble balance, leaving self-attraction, i.e.
have been reported in [19] with a total uncertainty of 4.2 μGal for the BIPM Kibble balance, leaving self-attraction, i.e.  , as the last effect to be solved. Note that in this paper the self-attraction effect denotes the combined attraction gravitational field at the weighing position due to the mass distribution of the Kibble balance instrument. The self-attraction follows Newton's law of universal gravitation, whose amplitude depends only on the mechanical construction, e.g. material density, segment mass distribution, distance to the weighing position. Conventionally, the self-attraction correction on g is about several tens of μGal based on either an evaluation or the measurement in NMIs' Kibble balances [20–22]. There are several methods that can make self-attraction contribution to the g measurement, e.g. a direct calculation following Newton's law of gravitation [23, 24], calculation using the finite element analysis (FEA) [25, 26], experimental measurement at the weighing position. For an experimental measurement method, there should be at least enough space for setting the measurement instrument (e.g. CG5), however, for most Kibble balances, this is not the case due to very limited space around the weighing position. Moreover, if the Kibble balance magnet is not well shielded, the gravimeter sensor can be significantly affected by the magnetic influence. Using the direct calculation based on Newton's law of gravitation, complex and high-precision models, which have been developed from the big G experiments [27, 28], are applied. Since the correction term is only a few parts in 108, an uncertainty of 10% is already good enough for the evaluation. In such a case, the FEA method has been a useful and powerful tool for evaluating the self-attraction contribution for absolute g measurement. The FEA method takes advantage of the CAD model and FEA automatic meshing tool, giving a satisfying 3D evaluation for the self-attraction.
, as the last effect to be solved. Note that in this paper the self-attraction effect denotes the combined attraction gravitational field at the weighing position due to the mass distribution of the Kibble balance instrument. The self-attraction follows Newton's law of universal gravitation, whose amplitude depends only on the mechanical construction, e.g. material density, segment mass distribution, distance to the weighing position. Conventionally, the self-attraction correction on g is about several tens of μGal based on either an evaluation or the measurement in NMIs' Kibble balances [20–22]. There are several methods that can make self-attraction contribution to the g measurement, e.g. a direct calculation following Newton's law of gravitation [23, 24], calculation using the finite element analysis (FEA) [25, 26], experimental measurement at the weighing position. For an experimental measurement method, there should be at least enough space for setting the measurement instrument (e.g. CG5), however, for most Kibble balances, this is not the case due to very limited space around the weighing position. Moreover, if the Kibble balance magnet is not well shielded, the gravimeter sensor can be significantly affected by the magnetic influence. Using the direct calculation based on Newton's law of gravitation, complex and high-precision models, which have been developed from the big G experiments [27, 28], are applied. Since the correction term is only a few parts in 108, an uncertainty of 10% is already good enough for the evaluation. In such a case, the FEA method has been a useful and powerful tool for evaluating the self-attraction contribution for absolute g measurement. The FEA method takes advantage of the CAD model and FEA automatic meshing tool, giving a satisfying 3D evaluation for the self-attraction.
In this article, we modelled the self-attraction effect for the BIPM Kibble balance by electrostatic FEA, which finalized the g determination in the forthcoming Planck constant measurement. The rest of this paper is organized as follows: in section 2, a general principle of how the self-attraction evaluation is related to the electrostatic FEA is presented. Both theoretical and experimental examples are used to verify the FEA method. In section 3, the BIPM Kibble balance instrument and the g correction from different segments are shown. In section 4, an experimental verification of the calculation and some discussions on the BIPM Kibble balance self-attraction effect during operation are discussed. In section 5, the absolute g number along the weighing trajectory is determined for the BIPM Kibble balance, and section 6 is the conclusion.
2. Model principle and verification
Here how the self-attraction effect evaluation being related to the electrostatic FEA is shown. We first give the attraction field of a mechanical part at the weighing position. It is assumed that the mechanical part is made from a material with homogeneous density distribution and its density is denoted by  . According to Newton's law of universal gravitation, the self-attraction field due to the focused mechanical part is mathematically expressed as
. According to Newton's law of universal gravitation, the self-attraction field due to the focused mechanical part is mathematically expressed as

where G is the gravitational constant, n = 1, 2, 3,..., N is the index of the mass contribution of the mechanical part, Vn is the volume of the index mass,  is the vector from the weighing position to the index mass Mn,
is the vector from the weighing position to the index mass Mn,  is a unit vector in the vertical direction z, pointing downward.
is a unit vector in the vertical direction z, pointing downward.
If the focused mechanical part is set to be vacuum and is filled with a uniform volume charge density  , the vertical electrical field at the weighing position Ez can be calculated as
, the vertical electrical field at the weighing position Ez can be calculated as

where  is the vacuum permittivity.
is the vacuum permittivity.
It can be seen that equations (2) and (3) have very similar mathematical forms. We can make simply a correspondence,  ,
,  so that
so that  . In such a way, the self-attraction calculation has been turned into an electrostatic analysis problem, which can be easily solved by FEA. In a summary, the FEA method for evaluating the self-attraction effect can be realized with the following 5 steps:
. In such a way, the self-attraction calculation has been turned into an electrostatic analysis problem, which can be easily solved by FEA. In a summary, the FEA method for evaluating the self-attraction effect can be realized with the following 5 steps:
- (1)Import the CAD model to the FEA software;
- (2)Apply vacuum to materials of all mechanical parts;
- (3)Assign excitation of a uniform volume charge density
 to the mechanical parts;
to the mechanical parts; - (4)Solve the electrical field at the mass position Ez;
- (5)

In order to verify and also to demonstrate the performance of the FEA method, an example with a known analytical solution of the gravitational field is tested. In the example, an aluminum sphere with radius R = 100 mm and material density  kg m−3, is chosen.
kg m−3, is chosen.
For a point in space (x, y, z) with  , the expression of the gravitational field pointing to the centre of the sphere ge is known as
, the expression of the gravitational field pointing to the centre of the sphere ge is known as
The gravitational field contribution along the r direction with ![$r\in \left[0~\text{mm},500~\text{mm}\right]$](https://content.cld.iop.org/journals/0026-1394/54/4/445/revision2/metaa71e1ieqn019.gif) is calculated both by equation (4) and the FEA. Figure 1 shows a comparison of the analytical and FEA results. It can be seen that the FEA calculation gives a good match to the analytical formula, and the maximum error is less than 0.1 μGal (1.25%). Note that for the Kibble balance, since the self-attraction correction is usually several parts in 108, the uncertainty for the correction term can be relaxed to 10−2 level or higher.
is calculated both by equation (4) and the FEA. Figure 1 shows a comparison of the analytical and FEA results. It can be seen that the FEA calculation gives a good match to the analytical formula, and the maximum error is less than 0.1 μGal (1.25%). Note that for the Kibble balance, since the self-attraction correction is usually several parts in 108, the uncertainty for the correction term can be relaxed to 10−2 level or higher.

Figure 1. A comparison of the gravitational field calculation by the analytical formula and FEA method. The lower plot is the difference between the FEA calculation and the analytical formula.
Download figure:
Standard image High-resolution imageFor a further verification of the FEA method, we also made an experimental check. In the measurement, a relative gravimeter, CG5, is set and well levelled on a table. A cylinder source mass M, made from FeNi alloy (Supra50) with the diameter dy = 360 mm, height hy = 260 mm, total mass my = 217 kg, is placed under the table and horizontally centered to the CG5 sensor. The gravitational acceleration gm is measured at two fixed source mass positions: the upper and lower positions are set where the source mass centre is respectively 440 mm and 835 mm under the CG5 sensor. Figure 2 shows the measurement result of the gravitational field at upper and lower positions with an instrument drift ≈ Gal min−1. By removing the linear drift of the CG5, the difference of the gravitational field at upper and lower positions is obtained as 4.5 μGal with a type A uncertainty of 0.3 μGal. This measurement result agrees well with the FEA calculation of 4.6 μGal.
Gal min−1. By removing the linear drift of the CG5, the difference of the gravitational field at upper and lower positions is obtained as 4.5 μGal with a type A uncertainty of 0.3 μGal. This measurement result agrees well with the FEA calculation of 4.6 μGal.
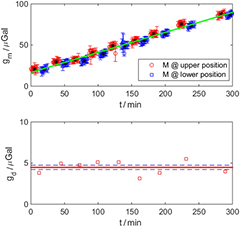
Figure 2. Experimental result of the gravitational field with different source mass positions. The upper plot is the raw data of the CG5 measurement with a instrument drift. The green curve is a linear fit of all the measurement data. The lower plot is the gravitational field difference between upper and lower positions. The red square is the differential signal of two mass positions after removing the measurement drift. The red line (—) is the average of the measurement, and the blue dash lines (--) denote the standard deviation of the mean (type A).
Download figure:
Standard image High-resolution image3. Self-attraction results
3.1. Overview of BIPM kibble balance apparatus
Figure 3 presents an overview of the BIPM Kibble balance apparatus. The magnet is constructed using two permanent magnet (Sm2Co17) rings with soft iron yokes (Supra50), which generates a strong radical magnetic field in a circular air gap. During the measurement, the coil is moved in the air gap by an electrostatic motor with a travel range of about 15 mm along the vertical direction. During the movement, the coil motion is controlled by independent feedback loops of targets, e.g. horizontal displacement, coil tilt. The coil vertical movement and velocity is measured by using interferometers equally separated at 120 degrees. A commercial weighing cell is employed for measuring the vertical force and a linear moving stage is used for adding or removing masses on the mass pan. All subsystems are supported by a robust aluminum structure. The structure and vacuum chamber are independently seated on a stone (marble) block, which is supported by the isolated ground base.
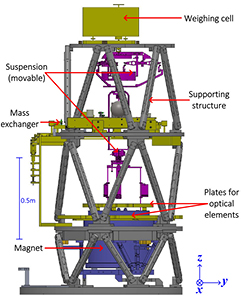
Figure 3. CAD model of the BIPM Kibble balance. The vacuum chamber and the bottom stone (marble) block are not shown.
Download figure:
Standard image High-resolution imageThe BIPM Kibble balance differs from the conventional two-mode measurement other Kibble balances. The BIPM apparatus takes both the velocity and weighing measurements simultaneously. This feature has the advantages of being insensitive to the magnetic field drift and other systematics, e.g. misalignment errors. Since the weighing is taken in the movement trajectory, in the following text, the weighing position denotes the vertical centre of the movement trajectory.
To simplify the calculation, we divide the BIPM Kibble balance apparatus into five parts for calculating the self-attraction field: the vacuum chamber, the magnet, the stone block, the supporting structure and the suspension. In the following subsections, the attraction contributions of each part are modelled individually.
3.2. Vacuum chamber
In Kibble balances, a vacuum chamber should be included for keeping a low pressure so that the index correction for length measurement as well as the buoyancy correction of the test mass can be reduced to a negligible level. The vacuum chamber of the BIPM Kibble balance has a total mass of 550 kg. Since it is made of aluminum, in the FEA calculation, the volume charge density is set as 2700 C m−3. Figure 4(a) shows the gravitational field contribution of the vacuum chamber. One interesting result is that the self-attraction contribution has four gravitational field peaks at the chamber wall position. These peaks are caused by four opening windows on the chamber, which intersect with the weighing horizontal plane. Since the up-down mass contribution of the chamber allows a significant cancellation of the self-attraction effect, the gravitational field at the weighing position is only 0.59 μGal. Note that on the horizontal plane, the centre of the chamber is shifted about 100 mm from the weighing centre.

Figure 4. FEA calculation results of gravitational field contribution for different parts of the BIPM Kibble balance: (a) the vacuum chamber, (b) the magnet, (c) the stone block, (d) the supporting structure and (e) the suspension. (f) denotes the total gravitational field mapping of the BIPM Kibble balance.
Download figure:
Standard image High-resolution image3.3. Magnet
The BIPM Kibble balance magnet system employs two permanent magnet rings with a symmetrical construction in both the vertical and radial directions [9, 12, 29, 30]. Currently, this system is operated with the upper yoke (top cover) open, replaced by an aluminum plate where all optics are seated. In the BIPM Kibble balance setup, the magnet is horizontally centered with the weighing position, and the vertical distance from the weighing position to the magnet centre is 693 mm. Unlike e.g. the NIST-4 Kibble balance, whose magnet is the most massive contributor (about 800 kg) to the self-attraction field [20], the BIPM magnet is only 150 kg. In addition, the separation between the weighing position and the magnet centre is also large, and hence the self-attraction contribution of the magnet should be greatly reduced. In the FEA calculation, the charge densities of the yoke (Supra50) and the permanent magnet (Co2Sm17) are set at 8200 C m−3 and 8300 C m−3, respectively.
Figure 4(b) presents the gravitational field contribution of the magnet system on the weighing horizontal plane, ![$x\in \left[-1000~\text{mm},1000~\text{mm}\right]$](https://content.cld.iop.org/journals/0026-1394/54/4/445/revision2/metaa71e1ieqn026.gif) ,
, ![$y\in \left[-1000~\text{mm},1000~\text{mm}\right]$](https://content.cld.iop.org/journals/0026-1394/54/4/445/revision2/metaa71e1ieqn027.gif) . It can be seen from the calculation that the magnet contributes maximum at the weighing position, 2.40 μGal, which is about one order of magnitude smaller than the number reported from some other Kibble balances [20–22].
. It can be seen from the calculation that the magnet contributes maximum at the weighing position, 2.40 μGal, which is about one order of magnitude smaller than the number reported from some other Kibble balances [20–22].
3.4. Stone block
The vacuum chamber legs are seated on an octagonal stone (marble) block. The sides of the block are 500 mm and 560 mm alternately, and its depth in the vertical direction is 160 mm. The distance from the centre of the block to the weighing position is 1300 mm. In the modelling, we set its material density at 2700 kg m−3. The gravitational field contribution from the stone block is shown in figure 4(c). The mapping is similar to the contribution of the magnet, but the amplitude is much smaller. The numerical value at the weighing position is 0.58 μGal. Note the stone block is centered to the vacuum chamber, shifted to the −y direction by 100 mm.
3.5. Supporting structure
In the BIPM Kibble balance, subsystems including the magnet, optical sensors, suspension and the moving mechanism are maintained on a robust aluminum support structure. The construction of the supporting structure is shown in figure 3. There are three general layers of construction. Each layer contains a base ring and 10 supporting bars. Both the rings and the bars are made of aluminum. In the calculation, the volume charge density of the whole supporting structure is set as 2700 C m−3. The gravitational field contribution from the supporting structure is shown in figure 4(d). As a result of the intersection of the upper supporting bars and the weighing horizontal plane, five peaks ≈ Gal are generated. This is similar to the result of the vacuum chamber. The self-attraction contribution at the weighing position is 0.65 μGal.
Gal are generated. This is similar to the result of the vacuum chamber. The self-attraction contribution at the weighing position is 0.65 μGal.
3.6. Suspension
The suspension denotes the remainder of Kibble balance apparatus, including the weighing cell, the moving mechanism, the mass exchanger and plates for the optics. As shown in figure 3, we separated the suspension into two main components in modelling the self-attraction effect: the fixed suspension part (weighing cell, mass exchanger, plates for optical elements) and the movable suspension part.
It should be noted that all the elements suspended from the weighing cell will not generate any attraction correction terms. This is because the attraction between these elements and the test mass is a net force, which will not be reflected in the weighing cell reading. Therefore, for modelling the self-attraction of the suspension, only the fixed part is considered. In the calculation, the weighing cell has a mass of 15 kg (defined by an average density) and the rest of elements are modelled by aluminum, i.e. with a uniform charge density of 2700 C m−3. The self-attraction field is calculated as shown in figure 4(e). Several gravitational field peaks (≈ Gal) are generated, in which the maximum is 3 μGal with an additional contribution from the mass transfer stage. Note that the self-attraction contribution contains a 'field well' in the weighing position, where the gravitational field is about 0.48 μGal.
Gal) are generated, in which the maximum is 3 μGal with an additional contribution from the mass transfer stage. Note that the self-attraction contribution contains a 'field well' in the weighing position, where the gravitational field is about 0.48 μGal.
3.7. Summary
Figure 4(f) presents the total gravitational field contribution at the weighing plane by combining all self-attraction components of the five main parts in the BIPM Kibble balance apparatus. Different sections of the Kibble balance apparatus can be easily identified in the plot: the inner field circle is created by the ring plate in the suspension system. The five stars are generated by the contribution of the support structure, and the outer four peaks are from the contribution of the vacuum chamber.
The total correction number for g measurement due to self-attraction effect is 4.7 μGal for the BIPM Kibble balance. Figure 5 shows how each part contributes to the self-attraction effect. The percentages of contributions by the vacuum chamber, the magnet, the stone block, the supporting structure and the suspension are 12.6%, 51.1%, 12.3%, 13.8% and 10.2%, respectively. More than half of the self-attraction correction for g measurement is contributed by the magnet.
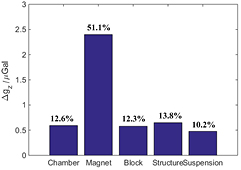
Figure 5. Contribution percentages of the vacuum chamber, the magnet, the stone block, the supporting structure and the suspension.
Download figure:
Standard image High-resolution image4. Discussion and experimental check
4.1. Vertical gradient of self-attraction field
Unlike other Kibble balances, one of the main features of the BIPM Kibble balance is that both the weighing and velocity modes are carried out simultaneously. Thus the vertical gradient of the self- attraction field along the movement axis should be known. To calculate the vertical gradient, the self-attraction field of five bulk structures at three different weighing heights, z = −10 mm, z = 0 mm and z = 10 mm with x = y = 0 mm, is solved. By a differential calculation of the self-attraction field change, we can directly obtain the vertical field gradient. Table 1 presents the FEA calculation result of the self-attraction field with three different mass positions. The self-attraction field gradient contributed by the vacuum chamber, the magnet, the stone block, the supporting structure and the suspension (without movable parts) are  Gal mm−1,
Gal mm−1,  Gal mm−1,
Gal mm−1,  Gal mm−1,
Gal mm−1, 
 Gal mm−1 and 0.0041 μGal mm−1. The total gravitational field slope of the self-attraction effect is
Gal mm−1 and 0.0041 μGal mm−1. The total gravitational field slope of the self-attraction effect is  Gal mm−1 in the vertical direction.
Gal mm−1 in the vertical direction.
Table 1. Calculation result of the self-attraction field with difference mass positions.
| z mm | Chamber μGal | Magnet μGal | Block μGal | Structure μGal | Suspension (fixed) μGal | Sum μGal |
|---|---|---|---|---|---|---|
| −10 | 0.608 | 2.484 | 0.587 | 0.661 | 0.419 | 4.759 |
| 0 | 0.592 | 2.398 | 0.578 | 0.648 | 0.477 | 4.693 |
| 10 | 0.589 | 2.322 | 0.568 | 0.634 | 0.500 | 4.613 |
| μGal mm−1 | −0.0010 | −0.0081 | −0.0009 | −0.0014 | 0.0041 | −0.0073 |
4.2. Uncertainty evaluation
In this subsection, we give a brief uncertainty budget of the self-attraction evaluation for the BIPM Kibble balance in table 2. The FEA calculation uncertainty is evaluated as 4%. Some minor mechanical parts are not included in the CAD model, and since it has both up and down mass distributions, on average, this uncertainty should be small. Here an enlarged component, 0.3 μGal, is given. The material density for the stone block is evaluated as 10%, and others are 4%, thus the contribution of the material uncertainty is 0.2 μGal.
Table 2. Uncertainty budget.
| Component | Amplitude μGal |
|---|---|
| Type A | <0.1 |
| FEA calculation | 0.2 |
| CAD modelling | 0.3 |
| Material density | 0.2 |
| Total (k = 1) | 0.5 |
A combination of all uncertainty components yields a final g correction term due to the self-attraction effect in the BIPM Kibble balance at the central trajectory position with a 1 kg test mass, i.e.  Gal.
Gal.
4.3. An experimental check
A new supporting and adjusting system for the magnet has recently been added to the BIPM Kibble balance, giving us the opportunity to make a measurement to check the self-attraction calculation. Since the BIPM Kibble balance currently uses a top-cover open magnet and the CG5 sensor is sensitive to the magnetic field (≈ Gal mT−1), the measurement is made without the magnet system. The mechanical parts included in the measurement are the lower segment and legs of the vacuum chamber, the bottom ring of the middle segment and the lower segment of the supporting structure, and the stone block.
Gal mT−1), the measurement is made without the magnet system. The mechanical parts included in the measurement are the lower segment and legs of the vacuum chamber, the bottom ring of the middle segment and the lower segment of the supporting structure, and the stone block.
In order to make an experimental check of the self-attraction calculation as well as to observe how the gravity changed from the previous measurement, three different measurement points, W1, M, W11 shown in figure 6, are chosen in the measurement. Note that the relative gravitational field difference of W1, W2, W11 is measured and reported in [19]. At that time, the weighing position was assumed to be at the centre of the Kibble balance isolated base, i.e. W2, at the height of 1300 mm. The horizontal gradient between M and W2 is measured at the height 1300 mm, yielding a negligible gravity difference of 0.014 μGal. Therefore, the measurement at point M can be directly compared to the original measurement at point W2.
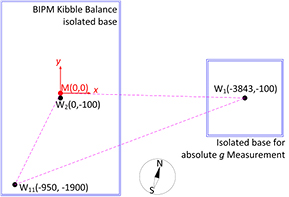
Figure 6. The map of measurement positions in the BIPM Kibble balance room (unit: mm). M(0, 0) is the actual weighing position as used in the self-attraction modelling.
Download figure:
Standard image High-resolution imageThe measurement is carried out at the CG5 sensor height of 1300 mm with a triangle sequence, i.e. W1, M, W11, W1, M, W11,.... The measurement consists of ten data points in about 5 h. The measurement result is shown in figure 7. By removing the CG5 sensor drift, the gravitational field difference between three measurement points are calculated and compared to the previous measurement, shown in table 3. It can be seen that the gravity difference W1–W11 matches the previous measurement, giving a check on the relative gravity change in the BIPM Kibble balance room. In theory, the field differences of W1–W2 and W2–W11 should be respectively decreased and increased by a same amount when considering the self-attraction while the experiment yields ( ) μGal, (
) μGal, ( ) μGal with an average of (
) μGal with an average of ( ) μGal. The FEA calculation at the height of 1380 mm (actual weighing height) gives a self-correction of 1.9 μGal. The gradient is calculated with
) μGal. The FEA calculation at the height of 1380 mm (actual weighing height) gives a self-correction of 1.9 μGal. The gradient is calculated with  Gal mm−1, and hence a height correction of 0.37 μGal for 80 mm should be added, which yields a total self-attraction 2.3 μGal at 1300 mm. The FEA calculation and the experimental measurement show a good agreement within the uncertainty.
Gal mm−1, and hence a height correction of 0.37 μGal for 80 mm should be added, which yields a total self-attraction 2.3 μGal at 1300 mm. The FEA calculation and the experimental measurement show a good agreement within the uncertainty.

Figure 7. Experimental result of the relative gravity measurement at points W1, M and W11 with a height of 1300 mm.
Download figure:
Standard image High-resolution imageTable 3. A summary of the relative gravity measurement result.
| Variable | Previous μGal | Present μGal | Self-attraction field μGal |
|---|---|---|---|
| W1–W11 |  |
 |
|
| W1–W2 |  |
 |
 |
| W2–W11 |  |
 |
 |
| Average of self-attraction field |  |
||
| FEA self-attraction field result |  |
||
5. Update of the absolute g determination
No absolute gravitational acceleration measurement has been carried out at the BIPM Kibble balance site since the 2009 international comparison of absolute gravimeters (ICAG2009) [19]. Therefore, the g value has been updated, based on the ICAG2009 measurement result, for the forthcoming Planck constant determination. The ICAG2009 comparison resulted in an absolute determination of the absolute g number of  μGal at the vertical height 1300 mm horizontally centered to the vacuum chamber. The measurement height of 1300 mm was based on the first BIPM Kibble balance design. The present weighing position (middle of the trajectory) of the BIPM Kibble balance apparatus is 80 mm higher and horizontally shifted by 100 mm along y direction. Without considering the self-attraction effect, the vertical gravity gradient (VGG) and horizontal gravity gradient (HGG) along y direction are respectively
μGal at the vertical height 1300 mm horizontally centered to the vacuum chamber. The measurement height of 1300 mm was based on the first BIPM Kibble balance design. The present weighing position (middle of the trajectory) of the BIPM Kibble balance apparatus is 80 mm higher and horizontally shifted by 100 mm along y direction. Without considering the self-attraction effect, the vertical gravity gradient (VGG) and horizontal gravity gradient (HGG) along y direction are respectively  Gal mm−1 and 1.4
Gal mm−1 and 1.4 μGal mm−1, which will produce a g number of
μGal mm−1, which will produce a g number of  μGal at the weighing position.
μGal at the weighing position.
As mentioned above, the evaluation of the gravity gradient along the movement trajectory is required for the BIPM Kibble balance. When considering the self-attraction gradient, the VGG is changed to  Gal mm−1. As a final result, the absolute g determination for the BIPM Kibble balance is
Gal mm−1. As a final result, the absolute g determination for the BIPM Kibble balance is

where  Gal mm−1 is the VGG and z the position (in mm) of the mass relative to the middle of the trajectory.
Gal mm−1 is the VGG and z the position (in mm) of the mass relative to the middle of the trajectory.
Since the ICAG2009 measurement was made 8 years ago, the long-term stability of the g value at the Kibble balance site should be evaluated. Figure 8 shows the historical g measurement differences from 2001 to 2009 based on comparison reference values (CRVs) [31–33]. To take the long-term g stability into account, we added an extended uncertainty component of 1.6 μGal, which covers all the measurement results (with uncertainties) of the CRVs. By adding this uncertainty component (1.6 μGal) and the self-attraction uncertainty (0.5 μGal) to the total uncertainty budget, the total uncertainty of g is given using 4.6 μGal (k = 1) for this update.

Figure 8. The gravitational acceleration at the BIPM Kibble balance site as a function of measurement time, traced to comparison reference values (CRVs) in 2001, 2005 and 2009. The updated g uses the 2009 measurement value with an extended uncertainty of 1.6 μGal.
Download figure:
Standard image High-resolution imageIn addition, by knowing the 3D attraction field contribution, the gravitational field contribution at the central trajectory plane has been updated as shown in figure 9. Note that the absolute g number in equation (5) does not include the corrections from Earth tides, polar motion, and atmospheric mass redistribution. These corrections have been estimated in [19] with uncertainty contributions of 0.3 μGal, 0.1 μGal, 1 μGal respectively, and will be corrected in real-time. Note that these uncertainty components have been included in the total 4.6 μGal uncertainty.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 9. The gravitational field contribution at the central trajectory plane (z = 0) when considering of the self-attraction effect (unit: μGal). The value at the weighing position (0, 0) is set to be zero.
Download figure:
Standard image High-resolution image{kind=link}
6. Conclusion
The self-attraction effect for the local gravitational acceleration g determination of the BIPM Kibble balance has been evaluated by matching equations of the electrostatic field and Newton's law of universal gravity. Accordingly, the self-attraction of the BIPM Kibble balance can be simulated using electrostatic finite element analysis. Based on a gravitational field mapping of different Kibble balance segments, a correction of  Gal for the gravitation acceleration determination, is obtained at the central trajectory with a 1 kg platinum-iridium mass. This correction term, about half of which is contributed by the magnet, is much smaller than that of most other NMI Kibble balances. The vertical gradient of self-attraction field and test mass dependence during the measurement have been also considered and analyzed. This information, together with a previous gravity mapping in the Kibble balance room, yields a determination of the local gravitational acceleration g along the mass movement trajectory with a relative uncertainty of 4.6 μGal, which will support the BIPM Kibble balance experiment in the near future towards an accurate measurement of the Planck constant for the forthcoming kilogram redefinition.
Gal for the gravitation acceleration determination, is obtained at the central trajectory with a 1 kg platinum-iridium mass. This correction term, about half of which is contributed by the magnet, is much smaller than that of most other NMI Kibble balances. The vertical gradient of self-attraction field and test mass dependence during the measurement have been also considered and analyzed. This information, together with a previous gravity mapping in the Kibble balance room, yields a determination of the local gravitational acceleration g along the mass movement trajectory with a relative uncertainty of 4.6 μGal, which will support the BIPM Kibble balance experiment in the near future towards an accurate measurement of the Planck constant for the forthcoming kilogram redefinition.